- Graficación
- Contenido
- Unidad 1 - Gráficas por Computadora
- 1.1 Historia de las Gráficas por Computadora
- 1.2 Aplicaciones de las Gráficas por Computadora
- 1.3 Tubos de Refresco de Rayos Catódicos
- 1.4 Pantallas por Barrido de Líneas
- 1.5 Monitores TRC de Color
- 1.6 Dispositivos de Visualización Tridimensional
- 1.7 Sistemas Estereoscópicos y de Realidad Virtual
- 1.8 Sistema de Barrido de Líneas
- 1.9 Dispositivos de Barrido Aleatorio o Vectorial (Vector Scanning)
- 1.10 Principales Herramientas y Estándares de Graficación
- Evaluación
- Unidad 2 - Algoritmos Básicos de Gráficas Raster para Primitivas en 2D
- Unidad 3 - Transformaciones Geométricas
- Unidad 4 - Graficación en 3D
- Unidad 5 - Representación Paramétrica de Curvas y Superficies
- Unidad 6 - Temas Avanzados de Graficación 3D
- Unidad 1 - Gráficas por Computadora
- Glosario
- Referencias
- Créditos
- Directorio
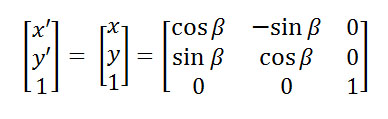
3.2.2 Rotación
|
Sea r(β) la matriz de rotación sobre el origen, en coordenadas homogéneas la rotación de un punto p alrededor del origen en 2D se puede expresar como el producto matricial p', = p*r(β), es decir:
|