3.5.2.- Cálculo por Gauss Jordan
|
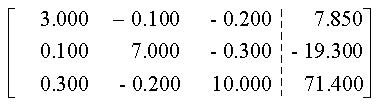
Este procedimiento se distingue del método Gaussiano en que cuando se elimina una incógnita, se elimina de todas las ecuaciones restantes, es decir, las que preceden a la ecuación pivote así como de las que la siguen. Para entender mejor este método, resolvamos el siguiente conjunto de ecuaciones: 3.0 X1 - 0.1 X2 - 0.2 X3 = 7.8500 0.1 X1 + 7.0 X2 - 0.3 X3 = - 19.3 0.3 X1 - 0.2 X2 + 10 X3 = 71.4000
Primero expresemos los coeficientes y el vector de términos independientes como una matriz aumentada.
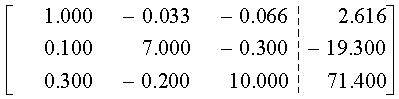
Se normaliza el primer renglón dividiendo entre 3 para obtener:
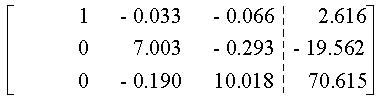
El término X1 se puede eliminar del segundo renglón restando 0.1 veces el primero del segundo renglón. De una manera similar, restando 0.3 veces el primero del tercer renglón se elimina el término con X1 del tercer renglón.
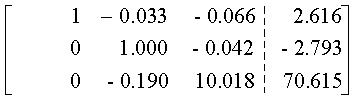
En seguida, se normaliza el segundo renglón dividiendo entre 7.00333:
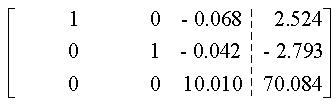
Reduciendo los términos en X2 de la primera y la tercera ecuación se obtiene:
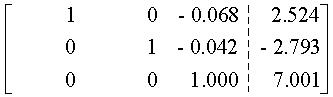
El tercer renglón se normaliza dividiéndolo entre 10.010:
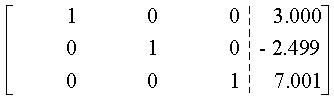
Finalmente, los términos con X3 se pueden reducir de la primera y segunda ecuación para obtener:
No se necesita sustitución hacia atrás para obtener la solución. Las ventajas y desventajas de la eliminación gaussiana se aplican también al método de Gauss-Jordan. Aunque los métodos de Gauss-Jordan y de eliminación de Gauss pueden parecer casi idénticos, el primero requiere aproximadamente 50% menos operaciones. Por lo tanto, la eliminación gaussiana es el mé todo simple por excelencia en la obtención de soluciones exactas a las ecuaciones lineales simultáneas. Una de las principales razones para incluir el método de Gauss-Jordan, es la de proporcionar un método directo para obtener la matriz inversa.
|